第四章习题
1.水准仪基本结构由 (A)构成。
(A)答案:①瞄准部、托架和基座。
②望远镜、水准器、基座。
③瞄准部、基座。
2.一测站的后视读数是 (A),前后视读数是 (B)。
(A)答案:①![]() 。②
。②![]() 。③
。③![]() -
-![]() 。 (B)答案:①
。 (B)答案:①![]() 。②
。②![]() 。③
。③![]() -
-![]() 。
。
3.水准仪的正确轴系应满足____(A)。
(A)答案:①视准轴⊥管水准轴、管水准轴∥竖轴、竖轴∥圆水准轴。
②视准轴∥管水准轴、管水准轴⊥竖轴、竖轴∥圆水准轴。
③视准轴∥管水准轴、管水准轴∥竖轴、竖轴⊥圆水准轴。
4.说明一测站视距长度的计算方法。
5.尺垫“顶面”是获取标尺读数的参照面,因此当在水准点立尺时,应在水准点标志上放上尺垫。对吗?为什么?
6.一测站水准测量基本操作中的读数之前的一操作____(A)。
(A)答案: ①必须做好安置仪器,粗略整平,瞄准标尺的工作。
②必须做好安置仪器,瞄准标尺,精确整平的工作。
③必须做好精确整平的工作。
7.一测站水准测量![]() <
<![]() ,则h<0。那么 。
,则h<0。那么 。
答案:①后视立尺点比前视立尺点低。②后视立尺点比前视立尺点高。③![]() -
-![]() 。
。
8.自动安平水准测量一测站基本操作____(A)。
(A)答案: ①必须做好安置仪器,粗略整平,瞄准标尺,读数记录。
②必须做好安置仪器,瞄准标尺,精确整平,读数记录。
③必须做好安置仪器,粗略整平,瞄准标尺,精确整平,读数记录。
9.说明下表水准仪各操作部件的作用。
|
操作部件 |
作 用 |
操作部件 |
作 用 |
|
目镜调焦轮 |
|
水平制动旋钮 |
|
|
望远对光螺旋 |
|
水平微动旋钮 |
|
|
脚螺旋 |
|
微倾旋钮 |
|
10.水准仪与经纬仪应用脚螺旋的不同是 。
答案:①经纬仪脚螺旋应用于对中、精确整平,水准仪脚螺旋应用于粗略整平。
②经纬仪脚螺旋应用于粗略整平、精确整平,水准仪脚螺旋应用于粗略整平。
③经纬仪脚螺旋应用于对中,水准仪脚螺旋应用于粗略整平。
11.表4-10是改变仪器高观测法一测站的观测记录数据,判断哪些数据超限?
表4-10
|
测站 |
视
距s |
测次 |
后视读数 |
前视读数 |
h= |
备 注 |
|
|
1 |
|
56.3 |
1 |
1.737 |
1.215 |
0.522 |
|
|
|
51.0 |
2 |
1.623 |
1.113 |
0.510 |
||
|
d |
5.3 |
∑d |
5.3 |
平均h |
0.516 |
||
12.改变仪器高观测法一次观测的观测值是 。
答案:①后视距读数![]() 和
和![]() ,
,![]() ,前视距读数
,前视距读数![]() 和
和![]() ,
,![]() 。②
。②![]() ,
,![]() ,
,![]() ,
,![]() 。③d,
。③d,![]() ,∑d,
,∑d,![]() 。
。
13.在测站搬设中,为什么前视尺立尺点尺垫不得变动?
14.表4-11是一测段改变仪器高法往测各测站观测记录,计算各测站观测结果及测段往测高差。计算的检核标准见表4-1。
表4-11
|
测站 |
视 距s |
测次 |
后视读数 |
前视读数 |
h= |
备 注 |
||
|
1 |
|
56.3 |
1 |
1.731 |
1.215 |
|
δ= mm |
|
|
|
53.2 |
2 |
1.693 |
1.173 |
|
|||
|
d |
|
∑d |
|
平均h |
|
|||
|
2 |
|
34.7 |
1 |
2.784 |
2.226 |
|
δ=
mm |
|
|
|
36.2 |
2 |
2.635 |
2.082 |
|
|||
|
d |
|
∑d |
|
平均h |
|
|||
|
3 |
|
54.9 |
1 |
2.436 |
1.346 |
|
δ= mm |
|
|
|
51.5 |
2 |
2.568 |
1.473 |
|
|||
|
d |
|
∑d |
|
平均h |
|
|||
15.上题的测段起点为已知水准点A,高程HA=58.226m,终点为未知水准点B。利用上题的测段往测高差计算未知水准点B高程HB。
16.测站前、后视距尽量相等可削弱或消除 误差影响。
答案:①视准轴与管水准轴不平行和标尺升沉。
②水准标尺和视准轴与管水准轴不平行。
③视准轴与管水准轴不平行和地球曲率。
17.自动安平水准仪是否有管水准器气泡居中误差?
18.阴天观测可减少大气折射影响,为什么?
19.光电三角高程测量原理公式hAB=DAB×sin(αA+14.1"Dkm)+![]() A-
A-![]() B各符号的意义 。
B各符号的意义 。
答案:①hAB:B高程;DAB:A、B之间平距;αA:A观测B的垂直角;![]() A:
A:![]() 角;
角;![]() B:目标高。
B:目标高。
②hAB:A、B之间高差;DAB:A、B之间平距;αA:A观测B的垂直角;![]() A:仪器高;
A:仪器高;![]() B:目标高。
B:目标高。
③hAB:A、B之间高差;DAB:A、B之间斜距;αA:A观测B的垂直角;![]() A:仪器高;
A:仪器高;![]() B:目标高。
B:目标高。
20.利用光电三角高程测量精密公式计算下表各镜站点位的高程。
|
测站 |
镜站 |
光电测距斜距 m |
竖直角 ° ′ ″ |
仪器高 m |
目标高 m |
高差 m |
高程 m |
|
A HA:76.452m |
1 |
1253.876 |
1 26 23.7 |
1.543 |
1.345 |
|
|
|
2 |
654.738 |
1 04 43.2 |
1.543 |
1.548 |
|
|
|
|
3 |
581.392 |
0 56 32.6 |
1.543 |
1.665 |
|
|
|
|
4 |
485.142 |
0 47 56.8 |
1.543 |
1.765 |
|
|
|
|
5 |
347.861 |
0 38 46.3 |
1.543 |
1.950 |
|
|
21.三角高程测量的方法有 。
答案:①光电三角高程测量,平距三角高程测量,视距三角高程测量。
②光电三角高程测量,平视距三角高程测量,视距三角高程测量。
③光电三角高程测量,平距三角高程测量,斜视距三角高程测量。
22.写出用天顶距代替竖直角的视距三角高程测量计算公式。
23.说明双面尺法测量高差的工作步骤和计算检核项目。
24.水准路线有哪些形式?
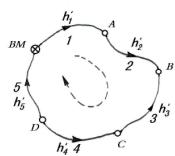
25.计算图4.35闭合水准路线各水准点的高程, 表4-12。
26.计算图4.36附合高程导线各高程点的高程,表4-13。
27.第三章"习题"13题,设A点高程HA=142.436m,仪器高![]() =1.562m,反射器高
=1.562m,反射器高![]() =1.800m,按光电三角高程测量原理求B点的高程HB及测线AB的平均高程。
=1.800m,按光电三角高程测量原理求B点的高程HB及测线AB的平均高程。
28.电子水准仪具有那些特点?
29.简述电子水准仪的测量原理。
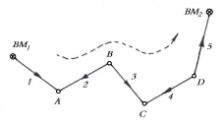
图4.35
图4.36
闭合水准路线的计算
表4-12
|
序 号 |
点 名 |
方 向 |
高差观测值 h'i(m) (1) |
测段长 Di(km) (3) |
测站数 nI (4) |
高差改正 vi=-Wni/N (mm)(7) |
高 差 最或然值 (m)(8) |
高 程 (m) (9) |
|
|
|
BM |
|
|
|
|
|
|
67.648 |
|
|
1 |
|
1.224 |
0.535 |
10 |
|
|
|||
|
A |
|
||||||||
|
2 |
|
-2.424 |
0.980 |
15 |
|
|
|||
|
B |
|
||||||||
|
3 |
|
-1.781 |
0.551 |
8 |
|
|
|||
|
C |
|
||||||||
|
4 |
|
1.714 |
0.842 |
11 |
|
|
|||
|
D |
|
||||||||
|
5 |
|
1.108 |
0.833 |
12 |
|
|
|||
|
BM |
67.648 |
||||||||
|
|
|
|
|
|
|
|
|||
|
(2)W=∑h'i= mm W容 =±58mm |
(5)[D]= km |
(6)N= |
(10)∑v= mm |
∑h= |
|
||||
附合高程导线的计算
表4-13
|
序 号 |
点 名 |
方 向 |
高差观测值 h'i (m) (1) |
测段长 Di (km) (2) |
高差改正 vi=-WD2/[DD] (mm) (5) |
高差最或然值 hi=h'i+vi (m) (7) |
高 程 H(m) (8) |
|
|
|
|
BM1 |
|
|
|
|
|
231.566 |
|
|
|
1 |
|
30.461 |
1.560 |
|
|
||||
|
A |
|
||||||||
|
2 |
|
51.253 |
0.879 |
|
|
||||
|
B |
|
||||||||
|
3 |
|
120.315 |
2.036 |
|
|
||||
|
C |
|
||||||||
|
4 |
|
78.566 |
1.136 |
|
|
||||
|
D |
|
||||||||
|
5 |
|
-36.560 |
1.764 |
|
|
||||
|
BM2 |
215.921 |
||||||||
|
|
|
|
|
|
|
|
|||
|
(3)W= mm W容 =±54mm |
(4)[D]= km [DD]= km |
(6)∑v= mm |
|
|
|
||||
|
|||||||||
参考答案
1.水准仪基本结构由 ③(A)构成。
(A)答案:③。
2.一测站的后视读数是 ② (A),前后视读数是 ① (B)。
(A)答案:②。 (B)答案:①。
3.水准仪的正确轴系应满足_②_(A)。
(A)答案:②。
4.说明一测站视距长度的计算方法。
提示:参考page 79,式(4-4)、式(4-5)。
5.尺垫“顶面”是获取标尺读数的参照面,因此当在水准点立尺时,应在水准点标志上放上尺垫。对吗?为什么?
答案:不对。水准点高程的位置是水准点标志的“顶面”,尺垫放在水准点标志上使标尺增加一个未知高度,将造成高差测量不准确。
6.一测站水准测量基本操作中的读数之前的一操作__③__(A)。
提示:参考page 74。
(A)答案: ③。
7.一测站水准测量![]() <
<![]() ,则h<0。那么 ② 。
,则h<0。那么 ② 。
答案:②。
8.自动安平水准测量一测站基本操作__①(A)。
(A)答案: ①。
9.说明下表水准仪各操作部件的作用。
答案:
|
操作部件 |
作 用 |
操作部件 |
作 用 |
|
目镜调焦轮 |
使十字丝像清楚,消除视差 |
水平制动旋钮 |
粗瞄标尺的起动与制动 |
|
望远对光螺旋 |
使标尺像清楚,消除视差 |
水平微动旋钮 |
精瞄标尺 |
|
脚螺旋 |
粗略整平 |
微倾旋钮 |
精确整平 |
10.水准仪与经纬仪应用脚螺旋的不同是 ① 。
答案:①。
11.表4-10是改变仪器高观测法一测站的观测记录数据,判断哪些数据超限?
表4-10
|
测站 |
视 距s |
测次 |
后视读数 |
前视读数 |
h= |
备 注 |
|
|
1 |
|
56.3 |
1 |
1.737 |
1.215 |
0.522 |
|
|
|
51.0 |
2 |
1.623 |
1.113 |
0.510 |
||
|
d |
5.3 |
∑d |
5.3 |
平均h |
0.516 |
||
答案: d>5m,超限。Δh= h1- h2>±6mm超限。
12.改变仪器高观测法一次观测的观测值是 ② 。
答案:②。
13.在测站搬设中,为什么前视尺立尺点尺垫不得变动?
答案:前视尺立尺点尺垫的“顶面”高程是整个测站观测过程的成果。测站搬设中一旦前视尺尺垫变动,则原高程成果不是“变动后的顶面”高程,“变动后的顶面”不再有高程,往后的高程测量没有高程传递值。
观测过程的成果是前视尺“尺垫的顶面”高程,是往后高程测量的高程传递值。在测站搬设中,前视尺立尺点尺垫不得变动,“尺垫的顶面”与高程传递值一致,才可以进行往后的高程测量。
14.表4-11是一测段改变仪器高法往测各测站观测记录,计算各测站观测结果及测段往测高差。计算的检核标准见表4-1。
本题自解。
表4-11
|
测站 |
视 距s |
测次 |
后视读数 |
前视读数 |
h= |
备 注 |
||
|
1 |
|
56.3 |
1 |
1.731 |
1.215 |
0.516 |
δ=-4mm |
|
|
|
53.2 |
2 |
1.693 |
1.173 |
0.520 |
|||
|
d |
3.1 |
∑d |
3.1 |
平均h |
0.518 |
|||
|
2 |
|
34.7 |
1 |
2.784 |
2.226 |
0.558 |
δ=+5mm |
|
|
|
36.2 |
2 |
2.635 |
2.082 |
0.553 |
|||
|
d |
-1.5 |
∑d |
1.6 |
平均h |
0.556 |
|||
|
3 |
|
54.9 |
1 |
2.436 |
1.346 |
1.090 |
δ=-5mm |
|
|
|
51.5 |
2 |
2.568 |
1.473 |
1.095 |
|||
|
d |
|
∑d |
|
平均h |
1.092 |
|||
15.上题的测段起点为已知水准点A,高程HA=58.226m,终点为未知水准点B。利用上题的测段往测高差计算未知水准点B高程HB。
答案:HB= HA+h1+h2+h3=58.226m+0.518+0.556+1.092=60.392m。
16.测站前、后视距尽量相等可削弱或消除 ③ 误差影响。
答案:③。
17.自动安平水准仪是否有管水准器气泡居中误差?
提示:参考page 82倒第3行。
18.阴天观测可减少大气折射影响,为什么?
提示:参考page 84第3行~17行。
19.光电三角高程测量原理公式hAB=DAB×sin(αA+14.1"Dkm)+![]() A-
A-![]() B各符号的意义
③ 。
B各符号的意义
③ 。
答案:③。
20.利用光电三角高程测量精密公式计算下表各镜站点位的高程。
答案:
|
测站 |
镜站 |
光电测距斜距 m |
竖直角 ° ′ ″ |
仪器高 m |
目标高 m |
高差 m |
高程 m |
|
A HA:76.452m |
1 |
1253.876 |
1 26 23.7 |
1.543 |
1.345 |
31.814 |
108.266 |
|
2 |
654.738 |
1 04 43.2 |
1.543 |
1.548 |
12.350 |
88.802 |
|
|
3 |
581.392 |
0 56 32.6 |
1.543 |
1.665 |
9.543 |
85.915 |
|
|
4 |
485.142 |
0 47 56.8 |
1.543 |
1.765 |
6.560 |
83.012 |
|
|
5 |
347.861 |
0 38 46.3 |
1.543 |
1.950 |
3.524 |
79.976 |
21.三角高程测量的方法有 ① 。
答案:①。
22.写出用天顶距代替竖直角的视距三角高程测量计算公式。
提示:参考page 116式(6-10)。
23.说明双面尺法测量高差的工作步骤和计算检核项目。
提示:参考page 78~79。
24.水准路线有哪些形式?
提示:参考page 88。
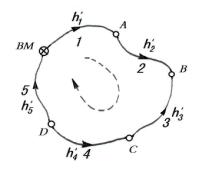
25.计算图4.35闭合水准路线各水准点的高程, 表4-12。
图4.35
闭合水准路线的计算
表4-12
|
序 号 |
点 名 |
方 向 |
高差观测值 h'i(m) (1) |
测段长 Di(km) (3) |
测站数 nI (4) |
高差改正 vi=-Wni/N (mm)(7) |
高 差 最或然值 (m)(8) |
高 程 (m) (9) |
|
|
|
BM |
|
|
|
|
|
|
67.648 |
|
|
1 |
+ |
1.224 |
0.535 |
10 |
+4 |
1.228 |
|||
|
A |
68.876 |
||||||||
|
2 |
+ |
-2.424 |
0.980 |
15 |
+7 |
-2.417 |
|||
|
B |
66.456 |
||||||||
|
3 |
- |
-1.781 |
0.551 |
8 |
-4 |
-1.785 |
|||
|
C |
68.244 |
||||||||
|
4 |
- |
1.714 |
0.842 |
11 |
-5 |
1.709 |
|||
|
D |
66.535 |
||||||||
|
5 |
+ |
1.108 |
0.833 |
12 |
+5 |
1.113 |
|||
|
BM |
67.648 |
||||||||
|
|
|
|
|
|
|
|
|||
|
(2)W=∑h'i=-25 mm W容 =±58mm |
(5)[D]=3.74 km |
(6) N=56 |
(10)∑v=25mm |
∑h= 0 |
|
||||
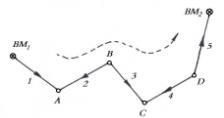
26.计算图4.36附合高程导线各高程点的高程,表4-13。
图4.36
附合高程导线的计算
表4-13
|
序 号 |
点 名 |
方 向 |
高差观测值 h'i (m) (1) |
测段长 Di(km) (2) |
高差改正 vi=-WD2/[DD] (mm) (5) |
高差最或然值 hi=h'i+vi (7) |
高 程 H(m) (8) |
|
|
|
|
BM1 |
|
|
|
|
|
231.566 |
|
|
|
1 |
+ |
30.461 |
1.560 |
-8.0 |
30.453 |
||||
|
A |
262.019 |
||||||||
|
2 |
- |
51.253 |
0.879 |
+3.0 |
51.256 |
||||
|
B |
210.763 |
||||||||
|
3 |
+ |
120.315 |
2.036 |
-15.0 |
120.300 |
||||
|
C |
331.063 |
||||||||
|
4 |
- |
78.566 |
1.136 |
+5.0 |
78.571 |
||||
|
D |
252.492 |
||||||||
|
5 |
+ |
-36.560 |
1.764 |
-11.0 |
-36.571 |
||||
|
BM2 |
215.921 |
||||||||
|
|
|
|
|
|
|
|
|||
|
(3)W=42 mm W容 =±54mm |
(4)[D]= 7.375 km [DD]= 11.753 km |
(6)∑v=-42 mm |
|
|
|||||
27.第三章"习题"13题,设A点高程HA=142.436m,仪器高![]() =1.562m,反射器高
=1.562m,反射器高![]() =1.800m,按光电三角高程测量原理求B点的高程HB及测线AB的平均高程。
=1.800m,按光电三角高程测量原理求B点的高程HB及测线AB的平均高程。
倾斜距离D=1265.540m,竖直角α=3°36′41″,仪器高![]() =1.562m,反射器高
=1.562m,反射器高![]() =1.800m,HA=142.436m。
=1.800m,HA=142.436m。
HB=142.436m +1265.540m×sin(3°36′41″+0.0014×1.2655km)+ 1.562m-1.800m=222.022m
Hm =(HA+ HB)/2=(142.436m+222.022m)/2=182.229m。
答:B点的高程HB=222.022m,测线AB的平均高程Hm=182.229m。
28.电子水准仪具有那些特点?
提示:参考page 87。
29.简述电子水准仪的测量原理。
提示:参考page 86。